


Wednesday, 15 April 2020
Monday, 8 May 2017
What is Servo Motor ?
A servomotor is a rotary actuator or linear actuator that allows for precise control of angular or linear position, velocity and acceleration. It consists of a suitable motor coupled to a sensor for position feedback.Servo motor is a special type of motor which is automatically operated up to certain limit for a given command with help of error-sensing feedback to correct the performance.This is normally a simple DC motor which is controlled for specific angular rotation with the help of additional servomechanism (a typical closed loop feedback control system). Now day’s servo system has huge industrial applications.

Application of Servo Motor-The servo motors are also commonly seen in remote controlled toy cars for controlling the direction of motion and it is also very commonly used as the motor which moves the tray of a CD or DVD player. Besides these, there are other hundreds of servo motor applications we see in our daily life. The main reason behind using a servo is that it provides angular precision, i.e. it will only rotate as much we want and then stop and wait for next signal to take further action. This is unlike a normal electrical motor which starts rotating as and when power is applied to it and the rotation continues until we switch off the power. We cannot control the rotational progress of electrical motor, but we can only control the speed of rotation and can turn it ON and OFF.
What is difference between Single Phase Motor and Three Phase Motor ?
Difference between Single Phase Motor and Three Phase Motor....
In Electrical Engineering single-phase electric power is the distribution of alternating current electric power using a system in which all the voltages of the supply vary in unison. Single-phase distribution is used when loads are mostly lighting and heating, with few large electric motors. A single-phase supply connected to an alternating current electric motor does not produce a revolving magnetic field; single-phase motors need additional circuits for starting, and such motors are uncommon above 10 kW in rating.
Single phase AC power systems peak in voltage at 90° and 270°. A cycle completes at 360°. Because of the rises and falls in voltage, power is not delivered at a constant rate.
In contrast, in a three-phase system, the currents in each conductor reach their peak instantaneous values sequentially, not simultaneously; in each cycle of the power frequency, first one, then the second, then the third current reaches its maximum value. The waveforms of the three supply conductors are offset from one another in time (delayed in phase) by one-third of their period. When the three phases are connected to windings around the interior of a motor stator, they produce a revolving magnetic field; such motors are self-starting.
High power systems, say hundreds of kVA or larger, are nearly always three phase. The largest supply normally available as single phase varies according to the standards of the electrical utility.
Sunday, 16 April 2017
What is difference between CampactLogix and ControlLogix PLC ?
Difference Between CampactLogic and ControlLogic....
1. I/O - The analog I/O on the control logix allows you to scale directly with the card setup. This can save some time in programming; however, with the use of remote I/O this advantage goes away.The scaling instructions in the logix are simple and quick so your really do not have much of an advantage here. I suspect there are also advantages in the amount of I/O points available to the control logix, however, I have generally run into problems with communications or memory use before having a problem with the amount of I/O that can be used.
 2. Memory - The controlLogix processors can give you significantly more memory to work with. This makes them much better suited to bigger systems. 3. Communications - This is the area that the control logix has the biggest advantage. There are many ways in which it out performs the compact logix here. First, and most obvious, are the communication cards available. Except for the L4x, The communication are built into the compact logix.  The L4x series has a separate Ethernet I/P card which can be useful, but it still has few communication options available. The only communication module available to all of the compact series is device net (yuck). You can get a compact with Control Net, but then you lose your Ethernet I/P port. So with the compact it is one or the other. The control logix has a wide array of communications modules available (Ethernet I/P, Control Net, DeviceNet, DH+, Profibus, etc). There are Rockwell cards and third party cards available. With the gateway capabilities of the logix platform, this makes it very powerful. Finally the control logix has the ability to communicate with more end devices on its Ethernet I/P modules. One gotcha with Ethernet I/P is the limitations of TCP connections and CIP connections. Every time you drop I/O or interface with a Panelview HMI you use up those connections. With the control logix, you not only get around double the connections available on most compacts, you can add additional cards to handle more connections. If you are doing any advanced communications, or communicating with multiple network types then you will want to move up to the control logix or at least have a control logix system in your system design to act as a gateway to the various networks. |
Thursday, 2 March 2017
How to make a Raspberry Pi Super Computer and List of Raspberry Pi Based Projects..?
A Raspberry Pi is an inexpensive, single-chip computer of credit card size, which has the capabilities of the processors that are used is in running the Linux and other operating systems. It is similar to the processors that are used in smart phones. Raspberry Pi functions as a regular desktop computer when it is connected to the keyboard or monitor. Raspberry is very cheap and most reliable to make a Raspberry Pi supercomputer.
A Raspberry Pi supercomputer is built by using 64-Raspberry Pi computers and Lego bricks. Raspberry Pi programming is done by using free computer programming software such as Python and Scratch. The super computer is also named as Irides- Pi, which runs off a single 13 Amp mains socket and uses MPI (Message Passing Interface) Protocol to communicate between nodes in parallel computers using Ethernet. It consists of totally 64 processors with 16 GB SD cards for each Raspberry Pi, and the Python tools in visual studio are used for developing a code in Raspberry Pi.

A Beowulf cluster is a set of computers that are networked together for task processing problems by Onyx lab which is not much useful. Furthermore, the Beowulf cluster is developed by using RPI clusters with some unique features for controlling a simple hardware, which is most useful and is of low cost in designing. The RPI platform is one of the cheapest ways to make RPI clusters of 32 nodes of Raspberry Pi that are used for making a Raspberry Pi supercomputer and its task is easy for simulation purpose
Steps to make a Raspberry Pi SuperComputer-
1. Onyx cluster has been gaining excellent rating for many years, but it has gone down due to many reasons and this cluster was unavailable during the time of the project. However, this requirement was overcome by the RPI cluster, which can be used for developing the projects that make use of a message passing interface or Java for making cluster.
2. RPI provides unique features that can be interfaced with the external low level embedded systems such as I2C, UART and SPI. This is most helpful for the electrical students doing testing on embedded systems in large scale industries.
3. The cluster needs to be installed with the necessary tools, and the user must have access to get the works done by the administrator.
4. Raspberry Pi processors are held in a place together with the support of Legos bricks to create the parallel computer, and are programmed by using Python software. Every Single Raspberry Pi is connected by 100 MB Ethernet bit and is powered by graphic chips.
5. Finally, RPis are cheap. The RPi platform is one of the cheapest ways to create a cluster of 32 nodes. The cost of an RPi with an 8GB SD card is quite equal to the price of one PC-based node, which can be used to create a 32 node Raspberry Pi Supercomputer cluster.

List of Raspberry Pi Based Projects-
- Raspberry Pi Based Solar LED Street Light.
- Programmable Sequential Switching by Using Raspberry pi.
- Raspberry pi Powered Wearable Computer.
- Synced Music and Christmas Lights.
- Home Automation Using Raspberry pi.
- Password based Load Control with Raspberry Pi.
- Raspberry pi Based Industrial Automation Using Zigbee Communication.
- Raspberry pi as an FM Transmitter.
- Lego Raspberry pi Enclosure.
- Access Control of Door and Home Security System by Raspberry Pi through Internet.
- Autonomous Robot Arm Control Based on Raspberry pi with Bluetooth Control.
- Patient Monitoring System using Raspberry Pi.
- Implementing of Weather Station using Raspberry Pi.
- Solar Data Logger using Raspberry Pi.
- Raspberry Pi based Wi-Fi Internet Radio Player.
- Raspberry Pi based Temperature Logging System on Web.
- Fuel and RPM Indicator for Automobile Application using Raspberry Pi.
- Tracking of GPS Position with Raspberry Pi.
- Heating Controller using Raspberry Pi.
- Raspberry Pi based Face Recognition Treasure Box.
- WI-FI Internet Radio Player using Raspberry Pi.
- Portable LCD Display using Raspberry Pi.
- Raspberry Pi Monitoring and Controlling of Industrial Loads.
- Time lapse Controller using Raspberry Pi.
- Raspberry Pi based Voice Controlled Coffee Machine.
- Traffic Light Control System using Raspberry Pi.
- Voice Activated Light Control with Relay using Raspberry Pi.
- Raspberry Pi based Wireless Multi-Channel Voice-Controlled Electrical Outlets.
- Android Operated Robotic Vehicle using Raspberry Pi Controller.
- Raspberry Pi Camera Robot.
- Multiple Raspberry Pi based 3D Scanner.
- Seven Segment LED Display of Notice Board using Raspberry Pi.
- Automatic Packet Reporting System using Raspberry Pi.
- Video Monitoring Wireless Transmission System using Raspberry Pi.
- Design of the Intelligent Home Appliances Control System using Raspberry Pi.
- High Sensitive IR based Unmanned Railway Gate Control using Raspberry Pi.
- Remote Surveillance System using Raspberry Pi.
- Wireless Bluetooth Controlled LPG Detecting Robot Underground and Mining using Raspberry pi.
- Browser Dependent Device Control using Raspberry Pi.
- Touch Screen based Security System based on Raspberry Pi.
- Raspberry Pi based Portable Room Alarm System.
- Solar Tracking System using Raspberry Pi Controller.
- Stepper Motors Controlling Using Raspberry Pi.
- Wireless AC control With Raspberry Pi.
- Raspberry Pi based Garage Door Automation.
- Auto Irrigation System with Humidity and Temperature Sensors using Raspberry Pi.
- Raspberry Pi based Home Theater System.
- Raspberry Pi based Remote Control Robotic Vehicle.
- GPS and GSM based Accident Information System Using Raspberry Pi.
- Raspberry pi Spray Painting Gun.
Wednesday, 1 March 2017
What is Operating System..?

The operating system (OS) is the most important program that runs on a computer. Every general-purpose computer must have an operating system to run other programs and applications. Computer operating systems perform basic tasks, such as recognizing input from the keyboard, sending output to the display screen, keeping track of files and directories on the disk, and controlling peripheral devices such as printers. For large systems, the operating system has even greater responsibilities and powers. It is like a traffic cop — it makes sure that different programs and users running at the same time do not interfere with each other. The operating system is also responsible for security, ensuring that unauthorized users do not access the system.
Classification of Operating systems-
Monday, 27 February 2017
WHAT IS PROGRAMMABLE AUTOMATION CONTROLLERS SYSTEM..?
programmable logic controller (PLC) to the scalable, multidisciplined, and informationenabled programmable automation controller (PAC), we need multiple controllers.
1-LARGE CONTROL SYSTEM
2.SMALL CONTROL SYSTEM
3.MICRO CONTROL SYSTEM.
LARGE CONTROL SYSTEM-

Our large control systems fit your most demanding application needs Enables modular architectures and various I/O and network topologies Delivers powerful control solutions with worldclass capabilities from process to safety to motion Offers reliability and performance for distributed or supervisory CONTROL SYSTEM Applications.
SMALL CONTROL SYSTEM-
Our small control systems offer the features and flexibility you need without the overhead of larger systems.Offers standard and safetycertified controllers in chassisbased, packaged and modular
designs Supports complex machine control, batch processing, and builds automation applications.
MICRO CONTROL SYSTEM-
Our micro control systems provide economica
l solutions for your basic control needs. Connects with straightforward programming tools Includes integrated I/O and communication Provides simple control timing and logic Supports applications such as conveyor automation and standalone machines
1-LARGE CONTROL SYSTEM
2.SMALL CONTROL SYSTEM
3.MICRO CONTROL SYSTEM.
LARGE CONTROL SYSTEM-
Our large control systems fit your most demanding application needs Enables modular architectures and various I/O and network topologies Delivers powerful control solutions with worldclass capabilities from process to safety to motion Offers reliability and performance for distributed or supervisory CONTROL SYSTEM Applications.
SMALL CONTROL SYSTEM-
Our small control systems offer the features and flexibility you need without the overhead of larger systems.Offers standard and safetycertified controllers in chassisbased, packaged and modular
designs Supports complex machine control, batch processing, and builds automation applications.
MICRO CONTROL SYSTEM-
Our micro control systems provide economica
l solutions for your basic control needs. Connects with straightforward programming tools Includes integrated I/O and communication Provides simple control timing and logic Supports applications such as conveyor automation and standalone machines
Tuesday, 21 February 2017
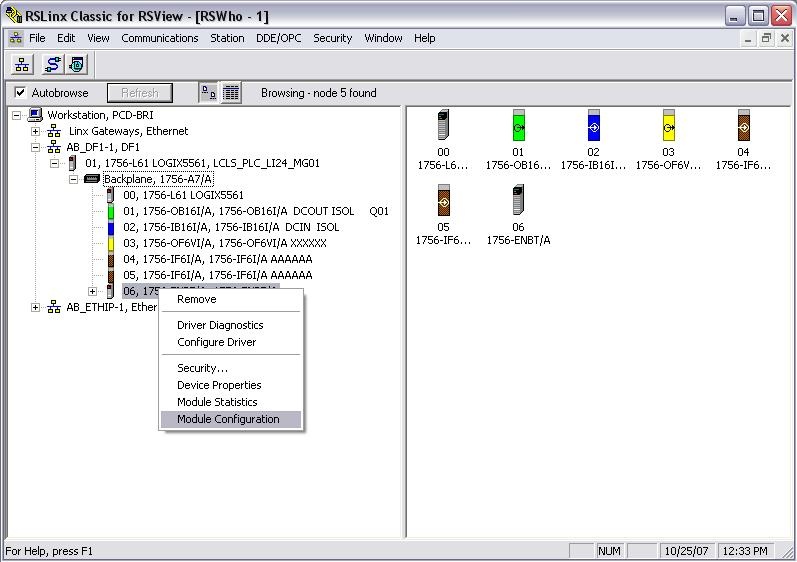
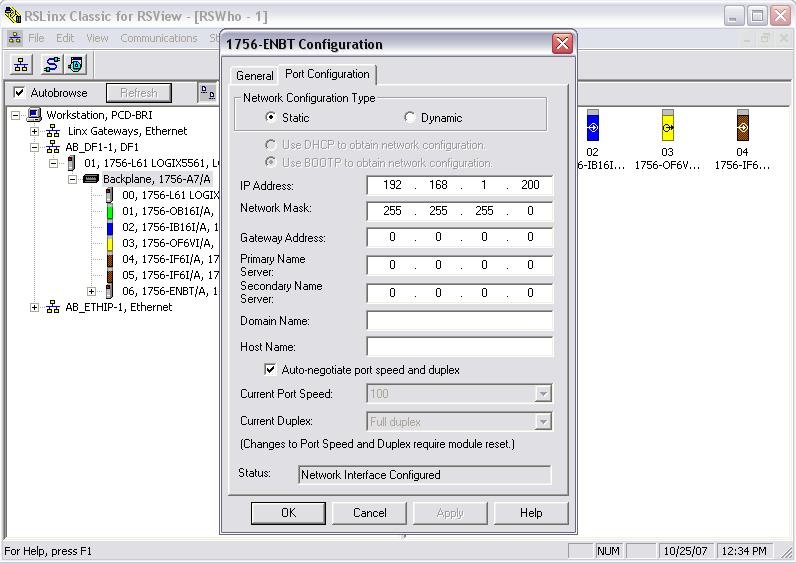
How To Configure PLC Ethernet Communications..?

Part I: Configuring IP Address for PLC using RSLINX
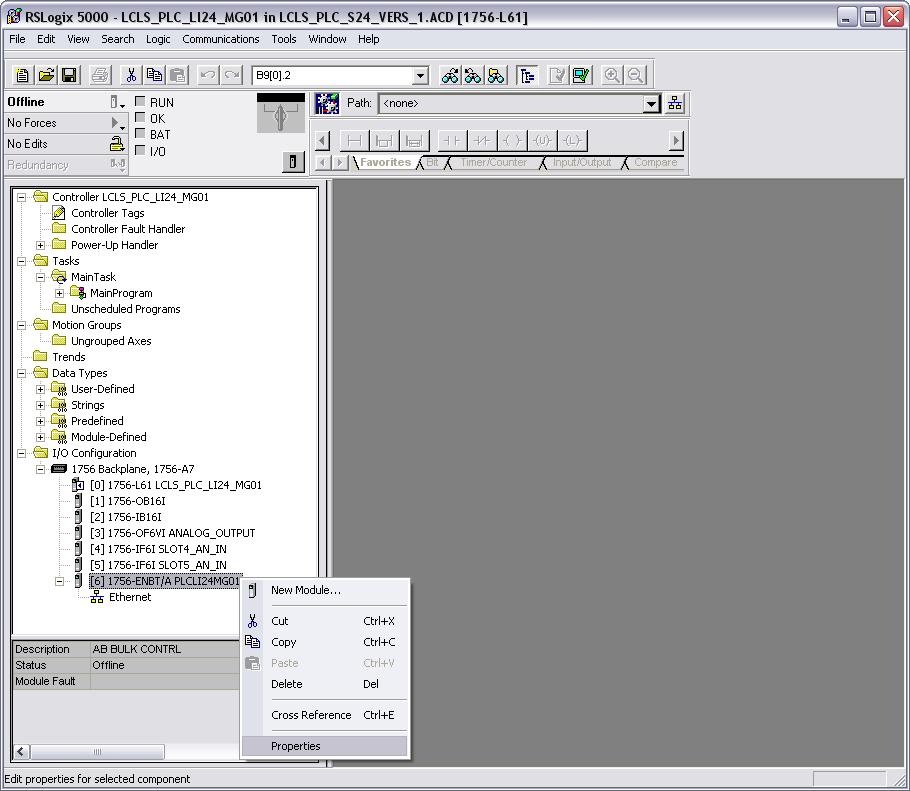
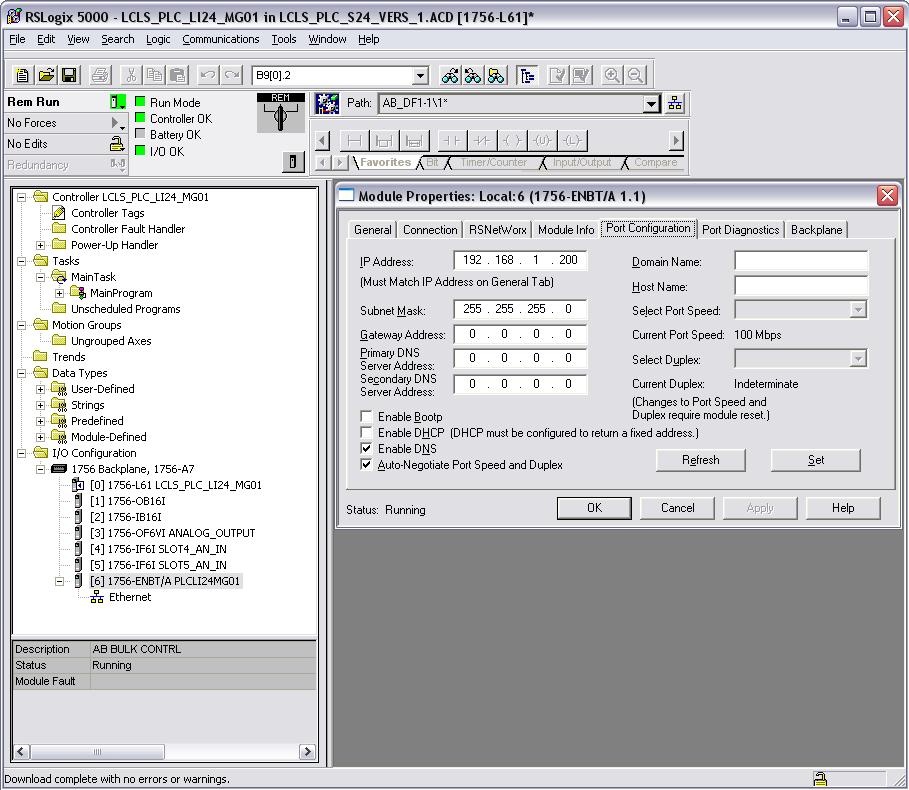
Part II: Configuring IP Address for PLC using RSLogix5000.
Part III: Configuring IP Address for a PanelView Plus
Thursday, 16 February 2017
What is a Variable Frequency Drive (VFD)..?

A Variable Frequency Drive (VFD) is a type of motor controller that drives an electric motor by varying the frequency and voltage supplied to the electric motor.
Other names for a VFD are variable speed drive, adjustable speed drive, adjustable frequency drive, AC drive, micro drive, and inverted.
Frequency (or hertz) is directly related to the motor’s speed (RPMs). In other words, the faster the frequency, the faster the RPMs go. If an application does not require an electric motor to run at full speed, the VFD can be used to ramp down the frequency and voltage to meet the requirements of the electric motor’s load. As the application’s motor speed requirements change, the VFD can simply turn up or down the motor speed to meet the speed requirement.
Frequency (or hertz) is directly related to the motor’s speed (RPMs). In other words, the faster the frequency, the faster the RPMs go. If an application does not require an electric motor to run at full speed, the VFD can be used to ramp down the frequency and voltage to meet the requirements of the electric motor’s load. As the application’s motor speed requirements change, the VFD can simply turn up or down the motor speed to meet the speed requirement.
Tuesday, 14 February 2017
How to Make a Network Cable...?
STEP-
1- Unroll the required length of network cable and add a little extra wire, just in case. If a boot is to be fitted, do so before stripping away the sleeve and ensure the boot faces the correct way.
2-Carefully remove the outer jacket of the cable. Be careful when stripping the jacket as to not nick or cut the internal wiring. One good way to do this is to cut lengthwise with snips or a knife along the side of the cable, away from yourself, about an inch toward the open end. This reduces the risk of nicking the wires' insulation. Locate the string inside with the wires, or if no string is found, use the wires themselves to unzip the sheath of the cable by holding the sheath in one hand and pulling sideways with the string or wire. Cut away the unzipped sheath and cut the twisted pairs about 1 1/4" (30 mm). You will notice 8 wires twisted in 4 pairs. Each pair will have one wire of a certain color and another wire that is white with a colored stripe matching its partner (this wire is called a tracer).
3- Inspect the newly revealed wires for any cuts or scrapes that expose the copper wire inside. If you have breached the protective sheath of any wire, you will need to cut the entire segment of wires off and start over at step one. Exposed copper wire will lead to cross talk, poor performance or no connectivity at all. It is important that the jacket for all network cables remains intact.
4- Untwist the pairs so they will lay flat between your fingers. The white piece of thread can be cut off even with the jacket and disposed (see Warnings). For easier handling, cut the wires so that they are 3/4" (19 mm) long from the base of the jacket and even in length.

5-Arrange the wires based on the wiring specifications you are following. There are two methods set by the TIA, 568A and 568B. Which one you use will depend on what is being connected. A straightthrough cable is used to connect two different layer devices (e.g. a hub and a PC). Two like devices normally require a crossover cable. The difference between the two is that a straightthrough
cable has both ends wired identically with 568B, while a crossover cable has one end wired 568A and the other end wired 568B.[1] For our demonstration in the following steps, we will use 568B, but the instructions can easily be adapted to 568A.568B Put the wires in the following order,
From left to
right:
white orange
orange
white green
blue
white blue
green
white brown
brown
568 A From left to right:
white/green
green
white/orange
blue
white/blue
orange
white/brown
brown
6-You can also use the mnemonic 1236/3612to remember which wires are switched.
7-Press all the wires flat and parallel between your thumb and forefinger. Verify the colors have remained in the correct order. Cut the top of the wires even with one another so that they are 1/2" (12.5 mm) long from the base of the jacket, as the jacket needs to go into the 8P8C connector by about 1/8", meaning that you only have a 1/2"of room for the individual cables. Leaving more than 1/2" untwisted can jeopardize connectivity and quality. Ensure that the cut leaves the wires even and clean; failure to do so may cause the wire not to make contact inside the jack and could lead to wrongly guided cores inside the plug.
8-Keep the wires flat and in order as you push them into the RJ45plug with the flat surface of the plug ontop. The white/orange wire should be on the left if you're looking down at the jack. You can tell if all the wiresmade it into the jack and maintain their positions by looking headon at the plug. You should be able to see a wire located in each hole, as seen at the bottom right. You may have to use a little effort to push the pairs firmly into the plug. The cabling jacket should also enter the rear of the jack about 1/4" (6 mm) to help secure the cable once the plug is crimped. You may need to stretch the sleeve to the proper length. Verify that the sequence is still correct before crimping.
9-Place the wired plug into the crimping tool. Give the handle a firm squeeze. You should hear a ratcheting noiseas you continue. Once you have completed the crimp, the handle will reset to the open position. To ensure all pins are set, some prefer to doublecrimpby repeating this step.
10-Repeat all of the above steps with the other end of the cable. The way you wire the other end (568A or568B) will depend on whether you're making a straightthrough, rollover, or cross over cable .
11-Test the cable to ensure that it will function in the field. Misunderstand incomplete network cables could lead to headaches down the road. In addition, with power over Ethernet (PoE) making its way into themarketplace, crossed wire pairs could lead to physical damage of computers or phone system equipment, making it even more crucial that the pairs are in the correct order. A simple cable tester can quickly verify that information foryou. Should you not have a network cable tester on hand, simply test connectivity pin to pin.

Subscribe to:
Posts (Atom)



